
Step 1: Fixed Mechanical Arm: First, pass the square nut through the expansion dock guide rail, and then use M4*10 internal hexagon screws to fix the servo mechanical arm to the Go2 expansion dock guide rail, as shown in the picture position.
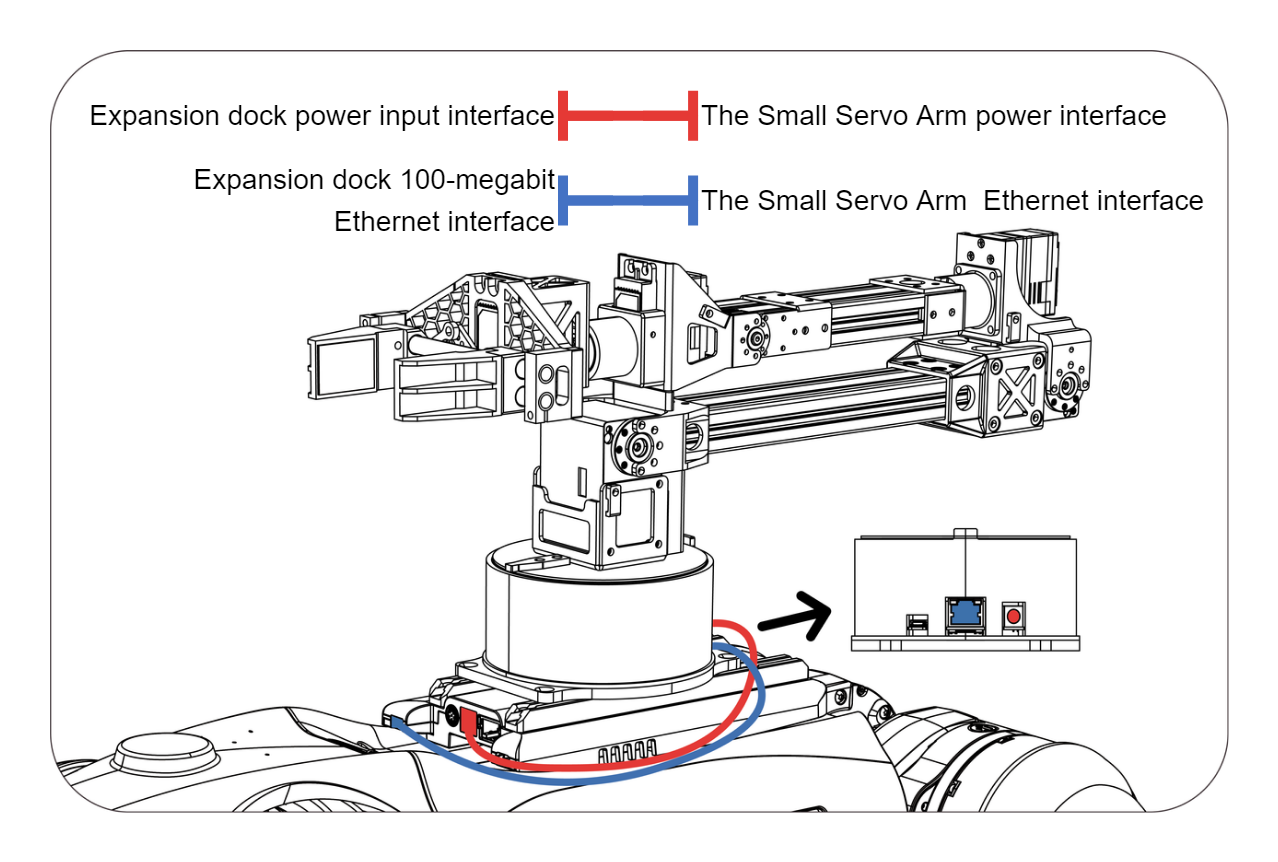
Step 2: Cable Connection: Connect the expansion dock power input interface to the servo mechanical arm power interface, and connect the expansion dock GP1.25-4PIN 100-megabit Ethernet port to the servo mechanical arm Ethernet port.
Complete installation.
