$\color{white}\colorbox{FE9227}{Persistence Pays Off! You're Sixty Percent There!}$ ▓▓▓▓▓▓▓▓▓▓▓▓▓▓▓▓▓░░░░░░░░░░░ 60%
SLAM (Simultaneous Localization and Mapping) with GMapping is an important technique used in robotics to help autonomous vehicles navigate and map their surroundings. It stands for simultaneous localization, which means the ability of a robot to determine its own position in an environment, and mapping, which refers to the process of creating a map of the environment as the robot explores it. GMapping is a popular SLAM algorithm that uses data from sensors, such as laser range finders, to build an accurate map and estimate the robot's position in real-time. In this guide, we will explore the concept of SLAM with GMapping and learn how it enables robots like LIMO to autonomously navigate and create maps of their surroundings. Follow below page to know more about GMapping.
<aside> 📒 Make sure LIMO is ON throughout the process!
</aside>
<aside> 📒 Click on orange text to know about commands.
</aside>
roslaunch limo_bringup limo_start.launch pub_odom_tf:=false
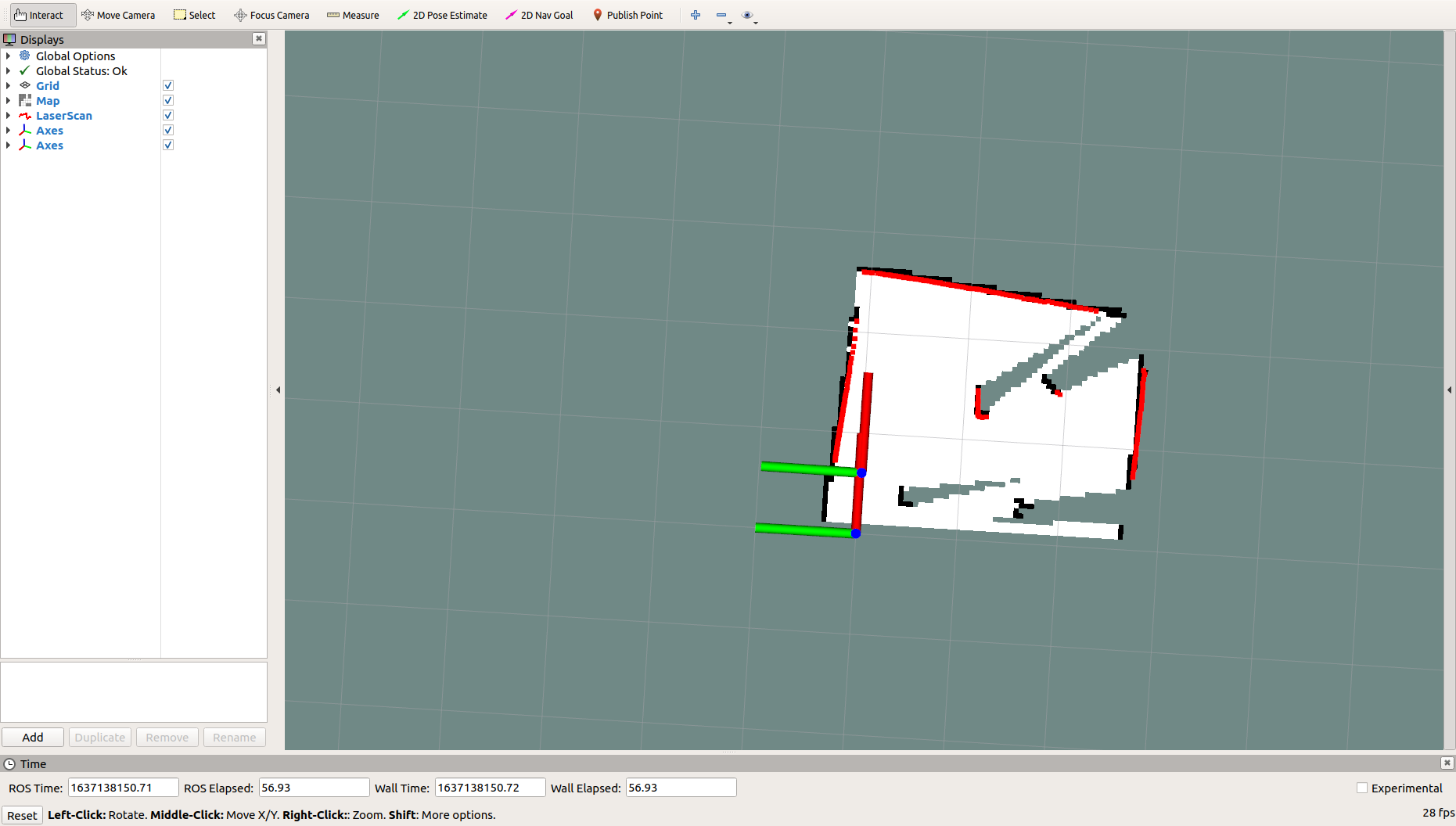
roslaunch limo_bringup limo_gmapping.launch
Upon successful launch, RViz will appear and present a display resembling the image shown below.
<aside> 💡 Use agile X mobile application to navigate and generate a map of area.
</aside>